




Det indgribende par af evolvente snekkegear og evolvente spiralgear er blevet meget anvendt i laveffekttransmissioner. Denne type indgribende par er relativt nem at designe og producere. Hvis delenes nøjagtighed er lidt dårlig, eller kravene til transmissionsforholdet ikke er særlig strenge i produktionen, er det også en god udvælgelsesmetode.
På nuværende tidspunkt er denne type transmissionspar ikke inkluderet i de generelle designdata, fordi teorien om den endnu ikke er fuldt ud moden.
Denne type indgribende par er et typisk punktkontakttransmissionspar. Fra et mikroskopisk synspunkt er den lokale spænding stor, og effektiviteten lav. Heldigvis er transmissionsmomentet lille, og kravene til effektivitet lave. Derfor er det ret markedsførbart. Et sådant design undgår forskellige problemer, der findes i fremstilling og samling af snekkegear.
Denne artikel diskuterer primært repræsentationen af denne type kontaktpar, der bevæger sig langs normalretningen i et meget lille område, ved hjælp af en animation i kontaktpunktets bevægelsesretning.
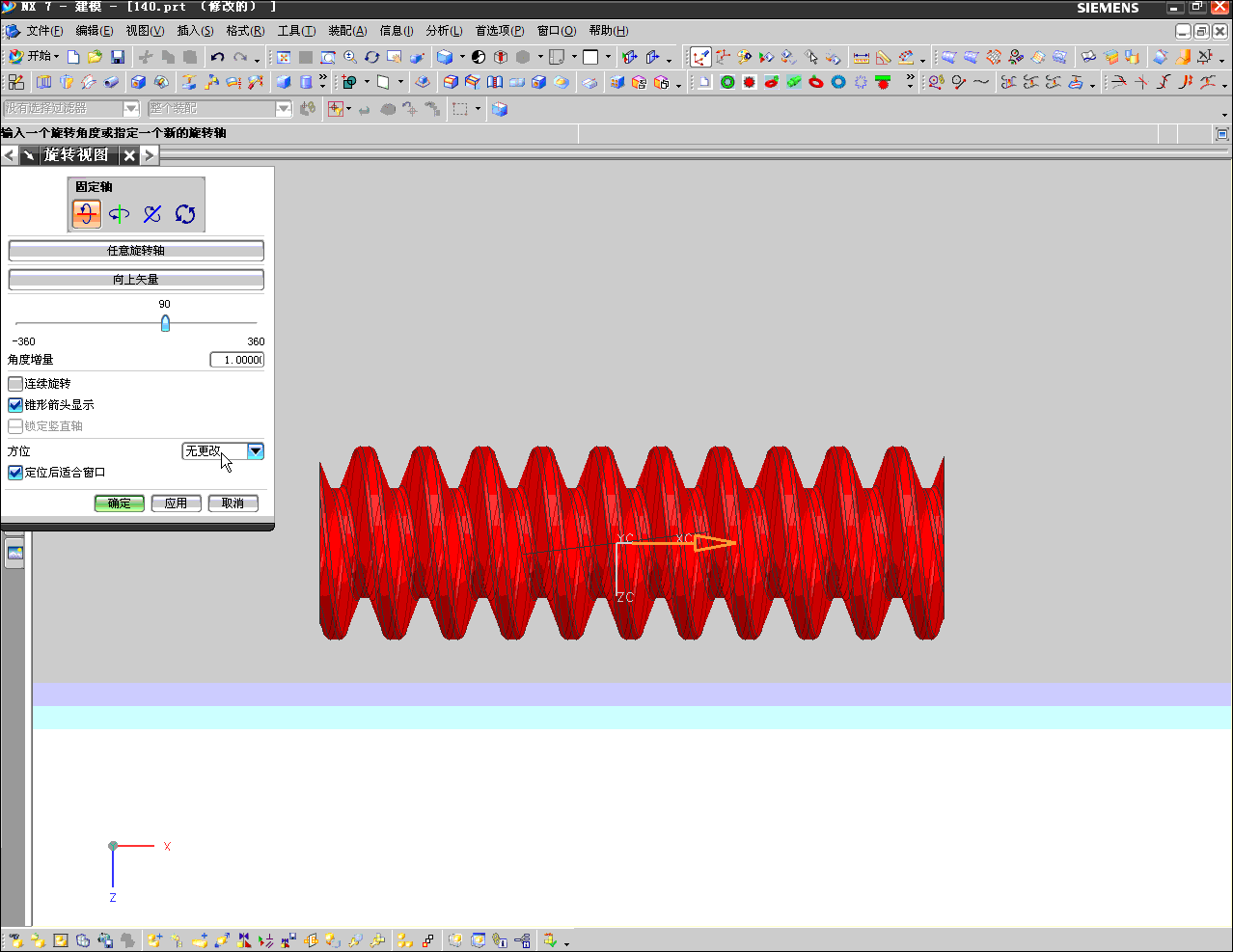
Lav et plan på den midterste del af maskeparret på tegningen, og bearbejd det til en gennemskinnelig og kontrasterende farve på tegningen, og lad det derefter rotere en stigende vinkel for snekken omkring den lodrette linje fra gearets centrum til snekken, som er placeret på normalplanets position, som vist i følgende figur:
Efter behandlingen tages det transmissionspar, der skal kontrolleres for indgrebsmærkerne, i en kontrastfarve, og en af dem tages som gennemskinnelig, så bevægelsen af indgrebspositionen i hele den dynamiske simuleringsprocessen tydeligt kan ses. Som vist nedenfor:
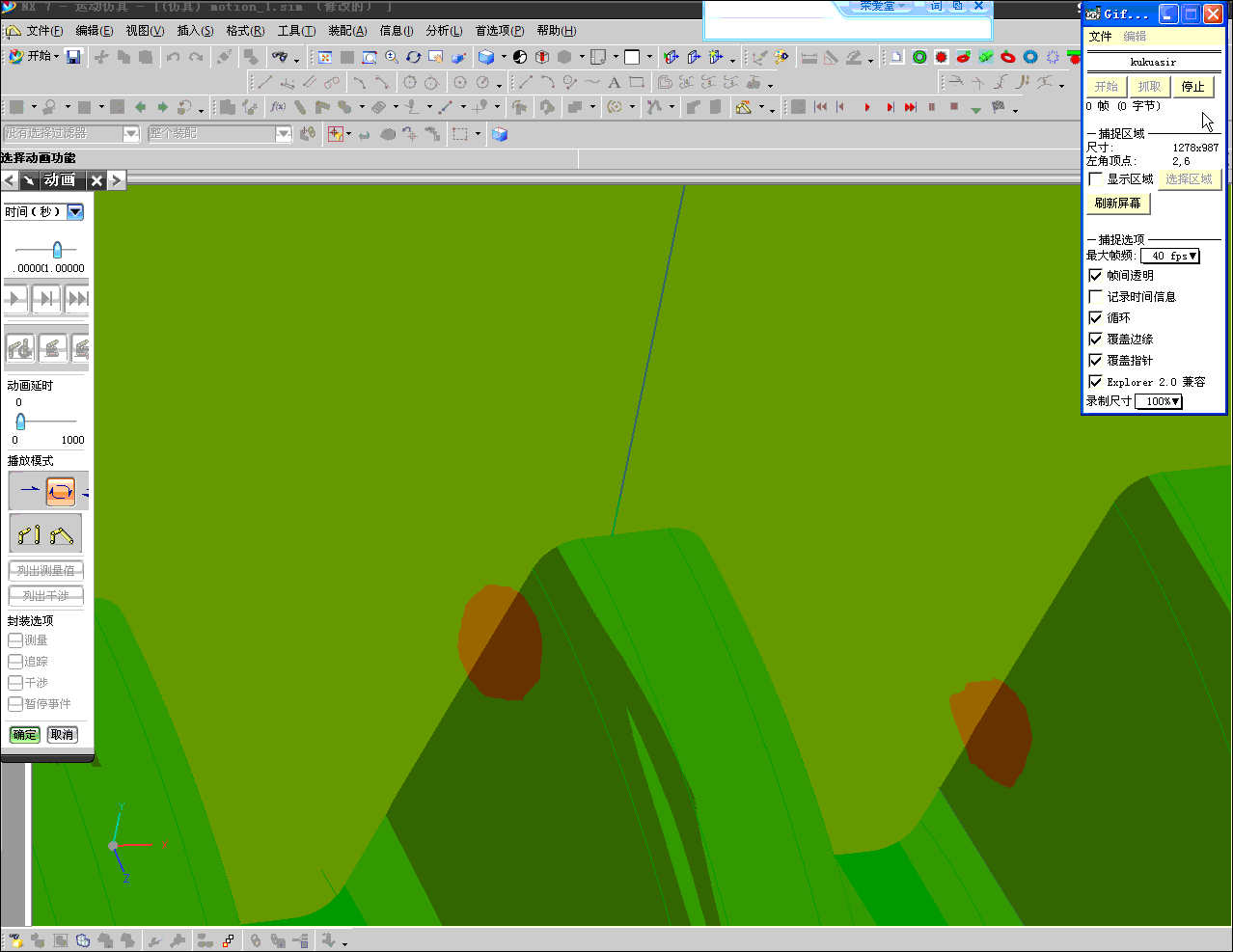
Under bevægelsen af det indgribende kontaktpunkt med tydelig kontrastfarve kan det ses, at det passerer gennem det normale ark.
Poster beregnet i ovenstående eksempel:
Foreløbig beregningsprotokol for evolvent snekke med spiralformet gear
inputdata
Normalt modul: 6, snekkeindekseringscirkeldiameter: 5, snekkehovednummer: 1, spiralformet tandnummer: 40
Normal trykvinkel: 20 spiralformet gearforvalg spiralvinkel: 6,89210257934639
Beregningsdata
Normal modulus: seks
Aksialmodul: seks hundrede og fire billioner og tre hundrede og syvogtres milliarder to hundrede og treogtyve millioner nitten tusinde og femogtredive
Gevindets stigende vinkel: 6,89210257934639
Spiralretning: Snekke- og spiralgearet er i samme retning
Centerafstand for nulforskydning: 14,5873444603807
Centerafstand for input transmissionspar: 14,75
Tilsvarende antal skruetænder: 8.27311576399391
Snekkens aksiale trykvinkel: 20.1339195068419
Radial afbøjningskoefficient for spiralformet gear: to tusinde syv hundrede og elleve
Ormespiralvinkel: 83.1078974206537
Grundlæggende parametre for orm 83.10789742065361
Snekkes største diameter: 6,2 snekkes lille diameter: 3,5 snekkes antal tænder: 1
Ormens normale modul: 6, ormens normale trykvinkel: 20, ormens indekseringscirkeldiameter: 5
Ormens radiale forskydningskoefficient: 0, ormens basecirkles diameter: 1,56559093858108
Ormemodul: 5 ormaksialmodul: seks hundrede og fire billioner og tre hundrede og syvogtres milliarder to hundrede og treogtyve millioner nitten tusinde og femogtredive
Snekkens aksiale trykvinkel: 20,1339195068419 Snekkens endefladetrykvinkel: 71,752752179164
Normal tandtykkelse på snekkeindekseringscirkel: 942477796076937 måling af tandhøjde på snekkeindekseringscirkel: seks
Snekkeindekseringscirkel gevindstigningsvinkel: 6,89210257934639 snekkeindekseringscirkel spiralvinkel: 83,1078974206537
Effektiv tandlængde på orm: 25
Snekke (aksial) ledning: 1.89867562790706
Grundlæggende parametre for spiralformet gear
Større diameter på spiralformet gear: 25,7 Mindre diameter på spiralformet gear: 23 Antal tænder på spiralformet gear: 40
Normalt modul for spiralformet gear: 6 spiralformet gear normal trykvinkel: 20 spiralformet gearmodifikationskoefficient: to tusinde syv hundrede og elleve
Diameter på indekseringscirkel for spiralformet gear: 24,1746889207614 Diameter på basiscirkel for spiralformet gear: 22,69738911811
Modul til spiralformet gears endeflade: 604367223019035 trykvinkel for spiralformet gears endeflade: 20.1339195068419
Spiralvinkel for indekseringscirkel for spiralformet gear: 6,89210257934639 bredde for spiralformet gear: 10
Spiralgear (aksial) føring: 628.318530717958
Antal tænder på tværs af den fælles normale linje for et spiralformet gear: 5 nominel værdi af den fælles normale linje for et spiralformet gear: 8,42519
Antal tænder på tværs af den fælles normale linje for et spiralformet gear: 6 nominel værdi af den fælles normale linje for et spiralformet gear: 10,19647
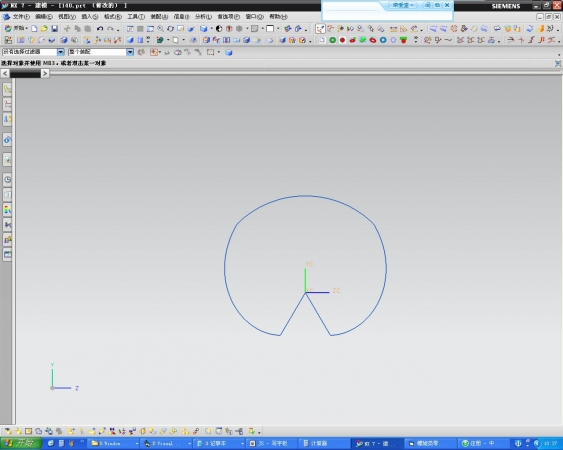
Diagram over en evolvent endeflade anvendt til modellering af evolvent orm:
Opslagstidspunkt: 11. juni 2022