




Gleasonspiralformede koniske tandhjuler en specialiseret type konisk tandhjul designet til at overføre kraft mellem skærende aksler, normalt i en 90 graders vinkel. Det, der gør Gleason-systemet unikt, er dets unikke tandgeometri og fremstillingsmetode, som giver jævn bevægelse, høj momentkapacitet og støjsvag drift. Disse tandhjul anvendes i vid udstrækning i transmissioner til biler, industri og luftfart, hvor pålidelighed og præcision er afgørende.
Gleason-systemet blev udviklet for at forbedre lige ognul-keglehjulved at introducere en buet, spiralformet tand. Denne spiralform muliggør gradvist indgreb mellem tænderne, hvilket reducerer støj og vibrationer betydeligt, samtidig med at det tillader højere rotationshastigheder og belastningskapacitet. Designet forbedrer også kontaktforholdet og overfladestyrken, hvilket sikrer effektiv kraftoverførsel under tunge eller dynamiske belastninger.
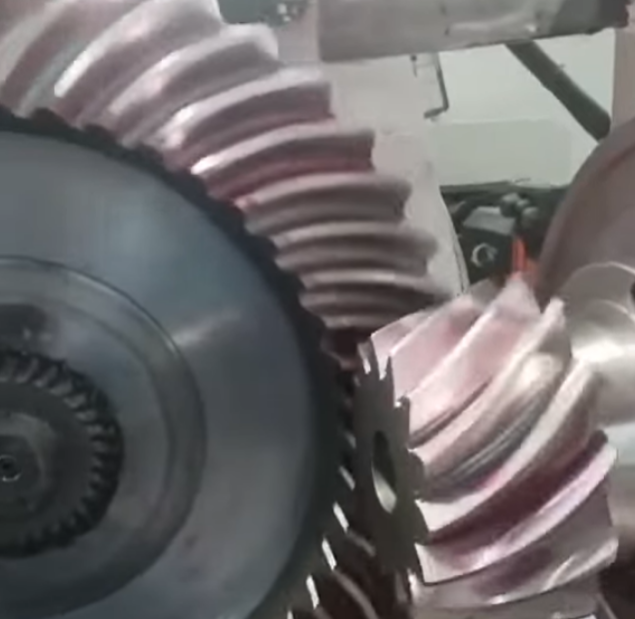
Hvert Gleason spiralformet konisk tandhjulspar består af et tandhjul og et modhjul, produceret med matchende geometri. Fremstillingsprocessen er højt specialiseret. Den begynder med smedning eller præcisionsstøbning af emner i legeret stål, såsom 18CrNiMo7-6, efterfulgt af grovskæring, fræsning eller formning for at generere den oprindelige tandhjulsform. Avancerede metoder som 5-akset bearbejdning, afskrabning og hårdskæring sikrer høj dimensionsnøjagtighed og optimeret overfladefinish. Efter varmebehandling såsom karburering (58-60 HRC) gennemgår tandhjulene lapning eller slibning for at opnå perfekt indgreb mellem tandhjul og tandhjul.
Geometrien for Gleason spiralformede koniske tandhjul er defineret af flere kritiske parametre - spiralvinkel, trykvinkel, stigningskegleafstand og fladebredde. Disse parametre beregnes præcist for at sikre korrekte tandkontaktmønstre og belastningsfordeling. Under den endelige inspektion verificerer værktøjer som koordinatmålemaskinen (CMM) og tandkontaktanalyse (TCA), at tandhjulssættet opfylder den krævede præcisionsklasse DIN 6 eller ISO 1328-1.

I drift, Gleason-spiralkoniske tandhjultilbyder høj effektivitet og stabil ydeevne selv under krævende forhold. De buede tænder giver kontinuerlig kontakt, hvilket reducerer spændingskoncentration og slid. Dette gør dem ideelle til bildifferentialer, lastbilgearkasser, tunge maskiner, marine fremdriftssystemer og elværktøj. Derudover giver muligheden for at tilpasse tandgeometri og monteringsafstand ingeniører mulighed for at optimere designet til specifikke drejningsmoment-, hastigheds- og pladsbegrænsninger.
Gleason-type spiralformet konisk gear — nøgleberegningstabel
| Punkt | Formel / Udtryk | Variabler / Noter |
|---|---|---|
| Inputparametre | (z_1, z_2, m_n, alpha_n, Sigma, b, T) | tandhjul/tandhjulstænder (z); normalt modul (m_n); normal trykvinkel (\alpha_n); akselvinkel (\Sigma); fladebredde (b); overført drejningsmoment (T). |
| Referencediameter (gennemsnit) | (d_i = z_i, m_n) | i = 1 (tandhjul), 2 (gear). Gennemsnits-/referencediameter i normalsektionen. |
| Stegvinkel (kegle) | (Δ1, Δ2) således at (Δ1 + Δ2 = ΔSigma) og (∫frac{sin Δ1}{d1} = Δ1(sin Δ2}{d2)) | Løs for at finde keglevinkler, der er i overensstemmelse med tandproportioner og akselvinkel. |
| Kegleafstand (afstand til pitch apex) | (R = \dfrac{d_1}{2\sin\delta_1} = \dfrac{d_2}{2\sin\delta_2}) | Afstand fra keglespids til delingscirkel målt langs generatrisen. |
| Cirkulær tonehøjde (normal) | (p_n = π m_n) | Lineær tonehøjde ved den normale sektion. |
| Tværgående modul (ca.) | (m_t = \dfrac{m_n}{\cos\beta_n}) | (βn) = normal spiralvinkel; transformerer mellem normal- og tværsnit efter behov. |
| Spiralvinkel (middel/tværgående forhold) | (\tan\beta_t = \tan\beta_n \cos\delta_m) | (Δm) = middelkeglevinkel; brug transformationer mellem normale, tværgående og middelspiralvinkler. |
| Anbefaling af ansigtsbredde | (b = k_b, m_n) | (k_b) typisk valgt fra 8 til 20 afhængigt af størrelse og anvendelse; kontakt designpraksis for den nøjagtige værdi. |
| Tillæg (gennemsnit) | (a \ca. m_n) | Standard fuld dybdetilføjelsestilnærmelse; brug nøjagtige tandproportionstabeller for præcise værdier. |
| Udvendig (spids) diameter | (d_{o,i} = d_i + 2a) | i = 1,2 |
| Roddiameter | (d_{f,i} = d_i – 2h_f) | (h_f) = dedendum (fra gearsystemets proportioner). |
| Cirkulær tandtykkelse (ca.) | (s \approx \dfrac{\pi m_n}{2}) | For smiggeometri skal du bruge den korrigerede tykkelse fra tandtabellerne for at sikre nøjagtighed. |
| Tangentiel kraft ved stigningscirkel | (F_t = ∫(dfrac{2T}{d_p)) | (T) = drejningsmoment; (d_p) = stigningsdiameter (brug ensartede enheder). |
| Bøjningsspænding (forenklet) | (\sigma_b = \dfrac{F_t \cdot K_O \cdot K_V}{b \cdot m_n \cdot Y}) | (K_O) = overbelastningsfaktor, (K_V) = dynamisk faktor, (Y) = formfaktor (bøjningsgeometri). Brug den fulde AGMA/ISO-bøjningsligning til design. |
| Kontaktspænding (Hertz-type, forenklet) | (\sigma_H = C_H \sqrt{\dfrac{F_t}{d_p, b} \cdot \dfrac{1}{\frac{1-\nu_1^2}{E_1} + \frac{1-\nu_2^2}{E_2}}}) | (C_H) geometrisk konstant, (E_i,\nu_i) materialets elasticitetsmoduler og Poisson-forhold. Brug fulde kontaktspændingsligninger til verifikation. |
| Kontaktforhold (generelt) | (\varepsilon = \dfrac{\text{virkningsbue}}{\text{basistonehøjde}}) | For koniske tandhjul beregn ved hjælp af keglegeometri og spiralvinkel; typisk evalueret med tandhjulsdesigntabeller eller software. |
| Virtuelt antal tænder | (z_v \approx \dfrac{d}{m_t}) | Nyttig til kontakt-/underskæringskontrol; (m_t) = tværgående modul. |
| Minimum tænder / underskæringskontrol | Brug minimum tændernes tilstand baseret på spiralvinkel, trykvinkel og tandproportioner | Hvis (z) er under minimum, kræves der underskæring eller specialværktøj. |
| Maskin-/fræserindstillinger (designtrin) | Bestem skærehovedvinkler, rotation af vugge og indeksering ud fra gearsystemets geometri | Disse indstillinger er afledt af geargeometrien og skæresystemet; følg maskin-/værktøjsproceduren. |
Moderne produktionsteknologi, såsom CNC-maskiner til skære- og slibemaskiner til koniske tandhjul, sikrer ensartet kvalitet og udskiftelighed. Ved at integrere computerstøttet design (CAD) og simulering kan producenter udføre reverse engineering og virtuel testning før den faktiske produktion. Dette minimerer leveringstid og omkostninger, samtidig med at præcision og pålidelighed forbedres.

Kort sagt repræsenterer Gleason spiralformede koniske tandhjul den perfekte kombination af avanceret geometri, materialestyrke og præcision i fremstillingen. Deres evne til at levere jævn, effektiv og holdbar kraftoverførsel har gjort dem til en uundværlig komponent i moderne drivsystemer. Uanset om de anvendes i bil-, industri- eller luftfartssektoren, fortsætter disse tandhjul med at definere fremragende bevægelse og mekanisk ydeevne.
Opslagstidspunkt: 24. oktober 2025